
Bộ khuếch đại điện tích CET-DQ601B



Mô tả ngắn gọn:
Bộ khuếch đại điện tích Enviko là bộ khuếch đại điện tích kênh có điện áp đầu ra tỷ lệ thuận với điện tích đầu vào. Được trang bị cảm biến áp điện, nó có thể đo gia tốc, áp suất, lực và các đại lượng cơ học khác của vật thể.
Được sử dụng rộng rãi trong các ngành thủy lợi, điện, khai khoáng, vận tải, xây dựng, động đất, hàng không vũ trụ, vũ khí và các ngành khác. Thiết bị này có đặc điểm sau.
Chi tiết sản phẩm
Tổng quan về chức năng
CET-DQ601B
Bộ khuếch đại điện tích là bộ khuếch đại điện tích kênh có điện áp đầu ra tỷ lệ thuận với điện tích đầu vào. Được trang bị cảm biến áp điện, nó có thể đo gia tốc, áp suất, lực và các đại lượng cơ học khác của vật thể. Nó được sử dụng rộng rãi trong bảo tồn nước, điện, khai thác mỏ, giao thông vận tải, xây dựng, động đất, hàng không vũ trụ, vũ khí và các bộ phận khác. Thiết bị này có đặc điểm sau.
1). Cấu trúc hợp lý, mạch điện được tối ưu hóa, các linh kiện chính và đầu nối được nhập khẩu, độ chính xác cao, tiếng ồn thấp và độ trôi nhỏ, đảm bảo chất lượng sản phẩm ổn định và đáng tin cậy.
2). Bằng cách loại bỏ đầu vào suy giảm của điện dung tương đương của cáp đầu vào, cáp có thể được kéo dài mà không ảnh hưởng đến độ chính xác của phép đo.
3). Đầu ra 10VP 50mA.
4). Hỗ trợ 4,6,8,12 kênh (tùy chọn), đầu ra kết nối DB15, điện áp làm việc: DC12V.

Nguyên lý làm việc
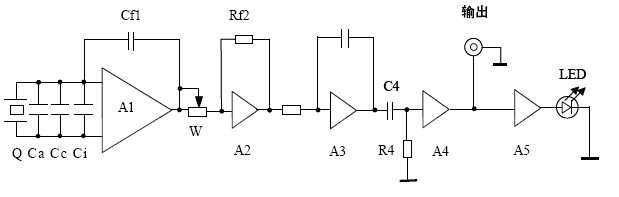
Bộ khuếch đại điện tích CET-DQ601B bao gồm tầng chuyển đổi điện tích, tầng thích ứng, bộ lọc thông thấp, bộ lọc thông cao, tầng quá tải bộ khuếch đại công suất cuối cùng và nguồn điện. Th:
1).Giai đoạn chuyển đổi điện tích: với bộ khuếch đại hoạt động A1 làm lõi.
Bộ khuếch đại điện tích CET-DQ601B có thể kết nối với cảm biến gia tốc áp điện, cảm biến lực áp điện và cảm biến áp suất áp điện. Đặc điểm chung của chúng là đại lượng cơ học được chuyển thành điện tích yếu Q tỷ lệ thuận với nó và trở kháng đầu ra RA rất cao. Giai đoạn chuyển đổi điện tích là chuyển đổi điện tích thành điện áp (1pc / 1mV) tỷ lệ thuận với điện tích và thay đổi trở kháng đầu ra cao thành trở kháng đầu ra thấp.
Ca---Điện dung của cảm biến thường là vài ngàn PF, 1/2 π Raca xác định giới hạn dưới tần số thấp của cảm biến.
Cc-- Điện dung cáp nhiễu thấp đầu ra của cảm biến.
Ci--Điện dung đầu vào của bộ khuếch đại hoạt động A1, giá trị điển hình là 3pf.
Giai đoạn chuyển đổi điện tích A1 sử dụng Bộ khuếch đại hoạt động chính xác băng rộng của Mỹ với trở kháng đầu vào cao, độ nhiễu thấp và độ trôi thấp. Tụ điện phản hồi CF1 có bốn mức 101pf, 102pf, 103pf và 104pf. Theo định lý Miller, điện dung hiệu dụng được chuyển đổi từ điện dung phản hồi sang đầu vào là: C = 1 + kcf1. Trong đó k là độ lợi vòng hở của A1 và giá trị điển hình là 120dB. CF1 là 100pF (tối thiểu) và C là khoảng 108pf. Giả sử chiều dài cáp nhiễu thấp đầu vào của cảm biến là 1000m, CC là 95000pf; Giả sử CA của cảm biến là 5000pf, tổng điện dung của caccic song song là khoảng 105pf. So với C, tổng điện dung là 105pf / 108pf = 1 / 1000. Nói cách khác, cảm biến có điện dung 5000pf và cáp đầu ra dài 1000m tương đương với điện dung phản hồi sẽ chỉ ảnh hưởng đến độ chính xác của CF1 0,1%. Điện áp đầu ra của tầng chuyển đổi điện tích là điện tích đầu ra của cảm biến Q / tụ điện phản hồi CF1, do đó độ chính xác của điện áp đầu ra chỉ bị ảnh hưởng 0,1%.
Điện áp đầu ra của tầng chuyển đổi điện tích là Q/CF1, do đó khi tụ phản hồi là 101pf, 102pf, 103pf và 104pf thì điện áp đầu ra lần lượt là 10mV/PC, 1mV/PC, 0,1mv/pc và 0,01mv/pc.
2).Mức độ thích ứng
Nó bao gồm bộ khuếch đại hoạt động A2 và biến trở điều chỉnh độ nhạy cảm biến W. Chức năng của giai đoạn này là khi sử dụng các cảm biến áp điện có độ nhạy khác nhau, toàn bộ thiết bị có điện áp đầu ra được chuẩn hóa.
3). Bộ lọc thông thấp
Bộ lọc công suất chủ động Butterworth bậc hai với lõi A3 có ưu điểm là ít thành phần hơn, điều chỉnh thuận tiện và dải thông phẳng, có thể loại bỏ hiệu quả ảnh hưởng của tín hiệu nhiễu tần số cao đến các tín hiệu hữu ích.
4).Bộ lọc thông cao
Bộ lọc thông cao thụ động bậc nhất bao gồm c4r4 có thể ngăn chặn hiệu quả ảnh hưởng của tín hiệu nhiễu tần số thấp lên các tín hiệu hữu ích.
5).Bộ khuếch đại công suất cuối cùng
Với A4 là lõi của gain II, bảo vệ ngắn mạch đầu ra, độ chính xác cao.
6). Mức quá tải
Với A5 làm lõi, khi điện áp đầu ra lớn hơn 10vp, đèn LED màu đỏ trên bảng điều khiển phía trước sẽ nhấp nháy. Lúc này, tín hiệu sẽ bị cắt cụt và méo tiếng, do đó cần giảm độ lợi hoặc tìm lỗi.
Thông số kỹ thuật
1) Đặc tính đầu vào: điện tích đầu vào tối đa ± 106Pc
2) Độ nhạy: 0,1-1000mv/PC (- 40'+60dB tại LNF)
3) Điều chỉnh độ nhạy cảm biến: bàn xoay ba chữ số điều chỉnh độ nhạy cảm biến 1-109,9pc/đơn vị (1)
4) Độ chính xác:
LMV / đơn vị, lomv / đơn vị, lomy / đơn vị, 1000mV / đơn vị, khi điện dung tương đương của cáp đầu vào nhỏ hơn lonf, 68nf, 22nf, 6.8nf, 2.2nf tương ứng, điều kiện tham chiếu lkhz (2) nhỏ hơn ± Điều kiện làm việc định mức (3) nhỏ hơn 1% ± 2%.
5) Bộ lọc và đáp ứng tần số
a)Bộ lọc thông cao;
Tần số giới hạn dưới là 0,3, 1, 3, 10, 30 và loohz, độ lệch cho phép là 0,3hz, - 3dB_ 1.5dB; l. 3, 10, 30, 100Hz, 3dB ± LDB, độ dốc suy giảm: - 6dB / cot.
b)bộ lọc thông thấp;
Tần số giới hạn trên: 1, 3, lo, 30, 100kHz, BW 6, độ lệch cho phép: 1, 3, lo, 30, 100khz-3db ± LDB, độ dốc suy giảm: 12dB / Oct.
6) đặc tính đầu ra
a)Biên độ đầu ra tối đa:±10Vp
b)Dòng điện đầu ra tối đa: ±100mA
c) Điện trở tải tối thiểu: 100Q
d)Độ méo hài: nhỏ hơn 1% khi tần số thấp hơn 30kHz và tải điện dung nhỏ hơn 47nF.
7) Tiếng ồn:< 5 UV (mức tăng cao nhất tương đương với đầu vào)
8) Chỉ báo quá tải: giá trị đỉnh đầu ra vượt quá I ±( Ở 10 + 0,5 FVP, đèn LED sẽ sáng trong khoảng 2 giây.
9) Thời gian làm nóng trước: khoảng 30 phút
10) Nguồn điện: AC220V ± 1O%
phương pháp sử dụng
1. Trở kháng đầu vào của bộ khuếch đại điện tích rất cao. Để tránh cơ thể con người hoặc điện áp cảm ứng bên ngoài làm hỏng bộ khuếch đại đầu vào, phải tắt nguồn điện khi kết nối cảm biến với đầu vào bộ khuếch đại điện tích hoặc tháo cảm biến hoặc nghi ngờ đầu nối bị lỏng.
2. Mặc dù có thể sử dụng cáp dài, nhưng việc kéo dài cáp sẽ gây ra tiếng ồn: tiếng ồn vốn có, chuyển động cơ học và tiếng ồn AC cảm ứng của cáp. Do đó, khi đo tại chỗ, cáp phải có độ ồn thấp và rút ngắn càng nhiều càng tốt, và phải cố định và cách xa thiết bị công suất lớn của đường dây điện.
3. hàn và lắp ráp các đầu nối được sử dụng trên cảm biến, cáp và bộ khuếch đại điện tích rất chuyên nghiệp. Nếu cần thiết, các kỹ thuật viên đặc biệt sẽ tiến hành hàn và lắp ráp; dung dịch ethanol khan nhựa thông (cấm sử dụng dầu hàn) sẽ được sử dụng để hàn. Sau khi hàn, bông y tế sẽ được phủ một lớp cồn khan (cấm sử dụng cồn y tế) để lau sạch chất trợ dung và than chì, sau đó lau khô. Đầu nối phải được giữ sạch và khô thường xuyên, và nắp chắn phải được vặn chặt khi không sử dụng
4. Để đảm bảo độ chính xác của dụng cụ, cần tiến hành làm nóng trước 15 phút trước khi đo. Nếu độ ẩm vượt quá 80%, thời gian làm nóng trước phải lớn hơn 30 phút.
5. Đáp ứng động của tầng ra: chủ yếu thể hiện ở khả năng dẫn động tải điện dung, được ước tính theo công thức sau: C = I / 2 л Trong công thức vfmax, C là điện dung tải (f); I là khả năng dòng điện đầu ra của tầng ra (0,05A); V là điện áp đầu ra cực đại (10vp); Tần số làm việc cực đại của Fmax là 100kHz. Vậy điện dung tải cực đại là 800 PF.
6). Điều chỉnh núm vặn
(1) Độ nhạy của cảm biến
(2) Lợi ích:
(3) Tăng II (tăng)
(4) - Giới hạn tần số thấp 3dB
(5) Giới hạn trên tần số cao
(6) Quá tải
Khi điện áp đầu ra lớn hơn 10vp, đèn báo quá tải sẽ nhấp nháy để nhắc nhở người dùng rằng dạng sóng bị méo. Độ lợi phải được giảm hoặc lỗi phải được loại bỏ
Lựa chọn và lắp đặt cảm biến
Do việc lựa chọn và lắp đặt cảm biến có tác động lớn đến độ chính xác đo lường của bộ khuếch đại điện tích nên sau đây là phần giới thiệu ngắn gọn: 1. Lựa chọn cảm biến:
(1) Thể tích và trọng lượng: là khối lượng bổ sung của vật thể được đo, cảm biến chắc chắn sẽ ảnh hưởng đến trạng thái chuyển động của nó, do đó khối lượng ma của cảm biến được yêu cầu phải nhỏ hơn nhiều so với khối lượng m của vật thể được đo. Đối với một số thành phần được thử nghiệm, mặc dù khối lượng lớn như một tổng thể, khối lượng của cảm biến có thể được so sánh với khối lượng cục bộ của cấu trúc ở một số bộ phận của lắp đặt cảm biến, chẳng hạn như một số cấu trúc có thành mỏng, sẽ ảnh hưởng đến trạng thái chuyển động cục bộ của cấu trúc. Trong trường hợp này, thể tích và trọng lượng của cảm biến được yêu cầu phải càng nhỏ càng tốt.
(2) Tần số cộng hưởng lắp đặt: nếu tần số tín hiệu đo được là f, tần số cộng hưởng lắp đặt phải lớn hơn 5F, trong khi đáp ứng tần số được đưa ra trong hướng dẫn sử dụng cảm biến là 10%, tức là khoảng 1/3 tần số cộng hưởng lắp đặt.
(3) Độ nhạy điện tích: càng lớn càng tốt, có thể giảm độ khuếch đại của bộ khuếch đại điện tích, cải thiện tỷ lệ tín hiệu trên nhiễu và giảm độ trôi.
2), Lắp đặt cảm biến
(1) Bề mặt tiếp xúc giữa cảm biến và bộ phận được thử nghiệm phải sạch và nhẵn, độ không bằng phẳng phải nhỏ hơn 0,01mm. Trục của lỗ vít lắp phải nhất quán với hướng thử nghiệm. Nếu bề mặt lắp ráp gồ ghề hoặc tần số đo được vượt quá 4kHz, có thể bôi một ít mỡ silicon sạch lên bề mặt tiếp xúc để cải thiện khả năng ghép tần số cao. Khi đo tác động, do xung tác động có năng lượng thoáng qua lớn nên kết nối giữa cảm biến và cấu trúc phải rất đáng tin cậy. Tốt nhất là sử dụng bu lông thép, mô-men xoắn lắp đặt khoảng 20kg. Cm. Chiều dài của bu lông phải phù hợp: nếu quá ngắn thì độ bền không đủ, còn nếu quá dài thì có thể để lại khe hở giữa cảm biến và cấu trúc, độ cứng sẽ giảm và tần số cộng hưởng sẽ giảm. Không nên vặn bu lông vào cảm biến quá nhiều, nếu không mặt phẳng đế sẽ bị cong và ảnh hưởng đến độ nhạy.
(2) Gioăng cách điện hoặc khối chuyển đổi phải được sử dụng giữa cảm biến và bộ phận được thử nghiệm. Tần số cộng hưởng của gioăng và khối chuyển đổi cao hơn nhiều so với tần số rung của cấu trúc, nếu không sẽ có thêm tần số cộng hưởng mới vào cấu trúc.
(3) Trục nhạy của cảm biến phải phù hợp với hướng chuyển động của bộ phận được thử nghiệm, nếu không độ nhạy theo trục sẽ giảm và độ nhạy theo chiều ngang sẽ tăng.
(4) Độ rung của cáp sẽ gây ra tiếng ồn do tiếp xúc kém và ma sát, do đó hướng ra của cảm biến phải theo hướng chuyển động tối thiểu của vật thể.
(5) Kết nối bu lông thép: đáp ứng tần số tốt, tần số cộng hưởng lắp đặt cao nhất, có thể truyền gia tốc lớn.
(6) Kết nối bu lông cách điện: cảm biến được cách điện với thành phần cần đo, có thể ngăn ngừa hiệu quả ảnh hưởng của trường điện mặt đất đến phép đo
(7) Kết nối đế gắn từ tính: đế gắn từ tính có thể chia thành hai loại: cách điện với mặt đất và không cách điện với mặt đất, nhưng không phù hợp khi gia tốc vượt quá 200g và nhiệt độ vượt quá 180.
(8) Liên kết lớp sáp mỏng: phương pháp này đơn giản, đáp ứng tần số tốt nhưng không chịu được nhiệt độ cao.
(9) Liên kết bu lông: đầu tiên bu lông được liên kết với cấu trúc cần kiểm tra, sau đó cảm biến được vặn chặt. Ưu điểm là không làm hỏng cấu trúc.
(10) Chất kết dính thông dụng: nhựa epoxy, nước cao su, keo 502, v.v.
Phụ kiện nhạc cụ và tài liệu đi kèm
1). Một đường dây điện xoay chiều
2). Một hướng dẫn sử dụng
3). 1 bản sao dữ liệu xác minh
4). Một bản sao của danh sách đóng gói
7,Hỗ trợ kỹ thuật
Vui lòng liên hệ với chúng tôi nếu có bất kỳ lỗi nào trong quá trình lắp đặt, vận hành hoặc bảo hành mà kỹ sư điện không thể bảo trì.
Lưu ý: Mã số sản phẩm cũ CET-7701B sẽ ngừng sử dụng cho đến hết năm 2021 (ngày 31 tháng 12 năm 2021), từ ngày 1 tháng 1 năm 2022, chúng tôi sẽ đổi sang mã số sản phẩm mới là CET-DQ601B.
Enviko đã chuyên về Hệ thống cân khi di chuyển trong hơn 10 năm. Cảm biến WIM và các sản phẩm khác của chúng tôi được công nhận rộng rãi trong ngành ITS.




